Error prediction determines the coordinate system used for the representation of novel dynamics
Curation statements for this article:-
Curated by eLife

eLife Assessment
This study provides a valuable new perspective on how motor learning occurring in one state generalizes to new states (for example, a different limb posture). The proposed model improves upon previous theories in its ability to predict patterns of generalization, but evidence supporting this specific proposed model over possible alternatives is incomplete. The newly proposed theory appears promising but would be more convincing if its conceptual and theoretical basis were clearer and more rigorously derived.
This article has been Reviewed by the following groups
Discuss this preprint
Start a discussion What are Sciety discussions?Listed in
- Evaluated articles (eLife)
Abstract
Skillful object manipulation requires a representation of the object’s dynamics. Despite extensive research, previous studies have not been able to provide a consistent view of this representation in the motor system, with each study providing evidence favoring an extrinsic coordinate system, an intrinsic coordinate system, an object-based representation, or mixtures of these coordinate systems. In a series of experiments, we show that the motor system combines different representations based on their reliability. Specifically, since noise creates an error between planned and executed force production which depends on the arm state, the motor system will rely more on the representation for which the plan is less affected. In addition, we show that the same mechanism predicts the different results made about dynamics representation and thus explains the discrepancies between influential past studies. Overall, we are able to reconcile all of the apparently disparate findings under a single cohesive model of dynamics representation.
Article activity feed
-

-

Author response:
Reviewer #1 (Public Review):
This paper proposes a novel framework for explaining patterns of generalization of force field learning to novel limb configurations. The paper considers three potential coordinate systems: cartesian, joint-based, and object-based. The authors propose a model in which the forces predicted under these different coordinate frames are combined according to the expected variability of produced forces. The authors show, across a range of changes in arm configurations, that the generalization of a specific force field is quite well accounted for by the model.
The paper is well-written and the experimental data are very clear. The patterns of generalization exhibited by participants - the key aspect of the behavior that the model seeks to explain - are clear and consistent across participants. …
Author response:
Reviewer #1 (Public Review):
This paper proposes a novel framework for explaining patterns of generalization of force field learning to novel limb configurations. The paper considers three potential coordinate systems: cartesian, joint-based, and object-based. The authors propose a model in which the forces predicted under these different coordinate frames are combined according to the expected variability of produced forces. The authors show, across a range of changes in arm configurations, that the generalization of a specific force field is quite well accounted for by the model.
The paper is well-written and the experimental data are very clear. The patterns of generalization exhibited by participants - the key aspect of the behavior that the model seeks to explain - are clear and consistent across participants. The paper clearly illustrates the importance of considering multiple coordinate frames for generalization, building on previous work by Berniker and colleagues (JNeurophys, 2014). The specific model proposed in this paper is parsimonious, but there remain a number of questions about its conceptual premises and the extent to which its predictions improve upon alternative models.
A major concern is with the model's premise. It is loosely inspired by cue integration theory but is really proposed in a fairly ad hoc manner, and not really concretely founded on firm underlying principles. It's by no means clear that the logic from cue integration can be extrapolated to the case of combining different possible patterns of generalization. I think there may in fact be a fundamental problem in treating this control problem as a cue-integration problem. In classic cue integration theory, the various cues are assumed to be independent observations of a single underlying variable. In this generalization setting, however, the different generalization patterns are NOT independent; if one is true, then the others must inevitably not be. For this reason, I don't believe that the proposed model can really be thought of as a normative or rational model (hence why I describe it as 'ad hoc'). That's not to say it may not ultimately be correct, but I think the conceptual justification for the model needs to be laid out much more clearly, rather than simply by alluding to cue-integration theory and using terms like 'reliability' throughout.
We thank the reviewer for bringing up this point. We see and treat this problem of finding the combination weights not as a cue integration problem but as an inverse optimal control problem. In this case, there can be several solutions to the same problem, i.e., what forces are expected in untrained areas, which can co-exist and give the motor system the option to switch or combine them. This is similar to other inverse optimal control problems, e.g. combining feedforward optimal control models to explain simple reaching. However, compared to these problems, which fit the weights between different models, we proposed an explanation for the underlying principle that sets these weights for the dynamics representation problem. We found that basing the combination on each motor plan's reliability can best explain the results. In this case, we refer to ‘reliability’ as execution reliability and not sensory reliability, which is common in cue integration theory. We have added further details explaining this in the manuscript.
“We hypothesize that this inconsistency in results can be explained using a framework inspired by an inverse optimal control framework. In this framework the motor system can switch or combine between different solutions. That is, the motor system assigns different weights to each solution and calculates a weighted sum of these solutions. Usually, to support such a framework, previous studies found the weights by fitting the weighed sum solution to behavioral data (Berret, Chiovetto et al. 2011). While we treat the problem in the same manner, we propose the Reliable Dynamics Representation (Re-Dyn) mechanism that determines the weights instead of fitting them. According to our framework, the weights are calculated by considering the reliability of each representation during dynamic generalization. That is, the motor system prefers certain representations if the execution of forces based on this representation is more robust to distortion arising from neural noise. In this process, the motor system estimates the difference between the desired generalized forces and generated generalized forces while taking into consideration noise added to the state variables that equivalently define the forces.”
A more rational model might be based on Bayesian decision theory. Under such a model, the motor system would select motor commands that minimize some expected loss, averaging over the various possible underlying 'true' coordinate systems in which to generalize. It's not entirely clear without developing the theory a bit exactly how the proposed noise-based theory might deviate from such a Bayesian model. But the paper should more clearly explain the principles/assumptions of the proposed noise-based model and should emphasize how the model parallels (or deviates from) Bayesian-decision-theory-type models.
As we understand the reviewer's suggestion, the idea is to estimate the weight of each coordinate system based on minimizing a loss function that considers the cost of each weight multiplied by a posterior probability that represents the uncertainty in this weight value. While this is an interesting idea, we believe that in the current problem, there are no ‘true’ weight values. That is, the motor system can use any combination of weights which will be true due to the ambiguous nature of the environment. Since the force field was presented in one area of the entire workspace, there is no observation that will allow us to update prior beliefs regarding the force nature of the environment. In such a case, the prior beliefs might play a role in the loss function, but in our opinion, there is no clear rationale for choosing unequal priors except guessing or fitting prior probabilities, which will resemble any other previous models that used fitting rather than predictions.
Another significant weakness is that it's not clear how closely the weighting of the different coordinate frames needs to match the model predictions in order to recover the observed generalization patterns. Given that the weighting for a given movement direction is over- parametrized (i.e. there are 3 variable weights (allowing for decay) predicting a single observed force level, it seems that a broad range of models could generate a reasonable prediction. It would be helpful to compare the predictions using the weighting suggested by the model with the predictions using alternative weightings, e.g. a uniform weighting, or the weighting for a different posture. In fact, Fig. 7 shows that uniform weighting accounts for the data just as well as the noise-based model in which the weighting varies substantially across directions. A more comprehensive analysis comparing the proposed noise-based weightings to alternative weightings would be helpful to more convincingly argue for the specificity of the noise-based predictions being necessary. The analysis in the appendix was not that clearly described, but seemed to compare various potential fitted mixtures of coordinate frames, but did not compare these to the noise-based model predictions.
We agree with the reviewer that fitted global weights, that is, an optimal weighted average of the three coordinate systems should outperform most of the models that are based on prediction instead of fitting the data. As we showed in Figure 7 of the submitted version of the manuscript, we used the optimal fitted model to show that our noise-based model is indeed not optimal but can predict the behavioral results and not fall too short of a fitted model. When trying to fit a model across all the reported experiments, we indeed found a set of values that gives equal weights for the joints and object coordinate systems (0.27 for both), and a lower value for the Cartesian coordinate system (0.12). Considering these values, we indeed see how the reviewer can suggest a model that is based on equal weights across all coordinate systems. While this model will not perform as well as the fitted model, it can still generate satisfactory results.
To better understand if a model based on global weights can explain the combination between coordinate systems, we perform an additional experiment. In this experiment, a model that is based on global fitted weights can only predict one out of two possible generalization patterns while models that are based on individual direction-predicted weights can predict a variety of generalization patterns. We show that global weights, although fitted to the data, cannot explain participants' behavior. We report these new results in Appendix 2.
“To better understand if a model based on global weights can explain the combination between coordinate systems, we perform an additional experiment. We used the idea of experiment 3 in which participants generalize learned dynamics using a tool. That is, the arm posture does not change between the training and test areas. In such a case, the Cartesian and joint coordinate systems do not predict a shift in generalized force pattern while the object coordinate system predicts a shift that depends on the orientation of the tool. In this additional experiment, we set a test workspace in which the orientation of the tool is 90° (Appendix 2- figure 1A). In this case, for the test workspace, the force compensation pattern of the object based coordinate system is in anti-phase with the Cartesian/joint generalization pattern. Any globally fitted weights (including equal weights) can produce either a non-shifted or 90° shifted force compensation pattern (Appendix 2- figure 1B). Participants in this experiment (n=7) showed similar MPE reduction as in all previous experiments when adapting to the trigonometric scaled force field (Appendix 2- figure 1C). When examining the generalized force compensation patterns, we observed a shift of the pattern in the test workspace of 14.6° (Appendix 2- figure 1D). This cannot be explained by the individual coordinate system force compensation patterns or any combination of them (which will always predict either a 0° or 90° shift, Appendix 2- figure 1E). However, calculating the prediction of the Re-Dyn model we found a predicted force compensation pattern with a shift of 6.4° (Appendix 2- figure 1F). The intermediate shift in the force compensation pattern suggests that any global based weights cannot explain the results.”
With regard to the suggestion that weighting is changed according to arm posture, two of our results lower the possibility that posture governs the weights:
(1) In experiment 3, we tested generalization while keeping the same arm posture between the training and test workspaces, and we observed different force compensation profiles across the movement directions. If arm posture in the test workspaces affected the weights, we would expect identical weights for both test workspaces. However, any set of weights that can explain the results observed for workspace 1 will fail to explain the results observed in workspace 2. To better understand this point we calculated the global weights for each test workspace for this experiment and we observed an increase in the weight for the object coordinates system (0.41 vs. 0.5) and a reduction in the weights for the Cartesian and joint coordinates systems (0.29 vs. 0.24). This suggests that the arm posture cannot explain the generalization pattern in this case.
(2) In experiments 2 and 3, we used the same arm posture in the training workspace and either changed the arm posture (experiment 2) or did not change the arm posture (experiment 3) in the test workspaces. While the arm posture for the training workspace was the same, the force generalization patterns were different between the two experiments, suggesting that the arm posture during the training phase (adaptation) does not set the generalization weights.
Overall, this shows that it is not specifically the arm posture in either the test or the training workspaces that set the weights. Of course, all coordinate models, including our noise model, will consider posture in the determination of the weights.
Reviewer #2 (Public Review):
Leib & Franklin assessed how the adaptation of intersegmental dynamics of the arm generalizes to changes in different factors: areas of extrinsic space, limb configurations, and 'object-based' coordinates. Participants reached in many different directions around 360{degree sign}, adapting to velocity-dependent curl fields that varied depending on the reach angle. This learning was measured via the pattern of forces expressed in upon the channel wall of "error clamps" that were randomly sampled from each of these different directions. The authors employed a clever method to predict how this pattern of forces should change if the set of targets was moved around the workspace. Some sets of locations resulted in a large change in joint angles or object-based coordinates, but Cartesian coordinates were always the same. Across three separate experiments, the observed shifts in the generalized force pattern never corresponded to a change that was made relative to any one reference frame. Instead, the authors found that the observed pattern of forces could be explained by a weighted combination of the change in Cartesian, joint, and object-based coordinates across test and training contexts.
In general, I believe the authors make a good argument for this specific mixed weighting of different contexts. I have a few questions that I hope are easily addressed.
Movements show different biases relative to the reach direction. Although very similar across people, this function of biases shifts when the arm is moved around the workspace (Ghilardi, Gordon, and Ghez, 1995). The origin of these biases is thought to arise from several factors that would change across the different test and training workspaces employed here (Vindras & Viviani, 2005). My concern is that the baseline biases in these different contexts are different and that rather the observed change in the force pattern across contexts isn't a function of generalization, but a change in underlying biases. Baseline force channel measurements were taken in the different workspace locations and conditions, so these could be used to show whether such biases are meaningfully affecting the results.
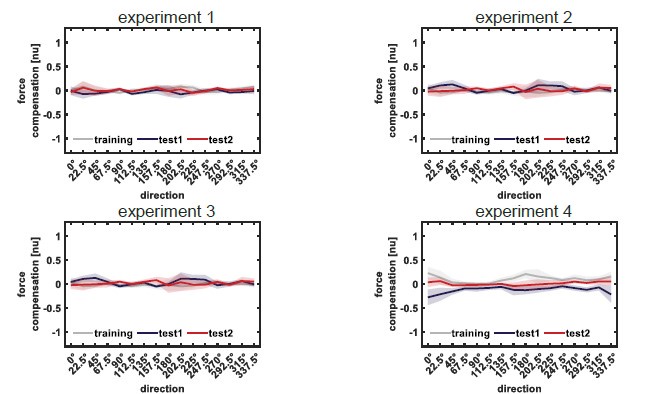
We agree with the reviewer and we followed their suggested analysis. In the following figure (Author response image 1) we plotted the baseline force compensation profiles in each workspace for each of the four experiments. As can be seen in this figure, the baseline force compensation is very close to zero and differs significantly from the force compensation profiles after adaptation to the scaled force field.
Author response image 1.
Baseline force compensation levels for experiments 1-4. For each experiment, we plotted the force compensation for the training, test 1, and test 2 workspaces.
Experiment 3, Test 1 has data that seems the worst fit with the overall story. I thought this might be an issue, but this is also the test set for a potentially awkwardly long arm. My understanding of the object-based coordinate system is that it's primarily a function of the wrist angle, or perceived angle, so I am a little confused why the length of this stick is also different across the conditions instead of just a different angle. Could the length be why this data looks a little odd?
Usually, force generalization is tested by physically moving the hand in unexplored areas. In experiment 3 we tested generalization using a tool which, as far as we know, was not tested in the past in a similar way to the present experiment. Indeed, the results look odd compared to the results of the other experiments, which were based on the ‘classic’ generalization idea. While we have some ideas regarding possible reasons for the observed behavior, it is out of the scope of the current work and still needs further examination.
Based on the reviewer’s comment, we improved the explanation in the introduction regarding the idea behind the object based coordinate system
“we could represent the forces as belonging to the hand or a hand-held object using the orientation vector connecting the shoulder and the object or hand in space (Berniker, Franklin et al. 2014).” The reviewer is right in their observation that the predictions of the object-based reference frame will look the same if we change the length of the tool. The object-based generalized forces, specifically the shift in the force pattern, depend only on the object's orientation but not its length (equation 4).
The manuscript is written and organized in a way that focuses heavily on the noise element of the model. Other than it being reasonable to add noise to a model, it's not clear to me that the noise is adding anything specific. It seems like the model makes predictions based on how many specific components have been rotated in the different test conditions. I fear I'm just being dense, but it would be helpful to clarify whether the noise itself (and inverse variance estimation) are critical to why the model weights each reference frame how it does or whether this is just a method for scaling the weight by how much the joints or whatever have changed. It seems clear that this noise model is better than weighting by energy and smoothness.
We have now included further details of the noise model and added to Figure 1 to highlight how noise can affect the predicted weights. In short, we agree with the reviewer there are multiple ways to add noise to the generalized force patterns. We choose a simple option in which we simulate possible distortions to the state variables that set the direction of movement. Once we calculated the variance of the force profile due to this distortion, one possible way is to combine them using an inverse variance estimator. Note that it has been shown that an inverse variance estimator is an ideal way to combine signals (e.g., Shahar, D.J. (2017) https://doi.org/10.4236/ojs.2017.72017). However, as we suggest, we do not claim or try to provide evidence for this specific way of calculating the weights. Instead, we suggest that giving greater weight to the less variable force representation can predict both the current experimental results as well as past results.
Are there any force profiles for individual directions that are predicted to change shape substantially across some of these assorted changes in training and test locations (rather than merely being scaled)? If so, this might provide another test of the hypotheses.
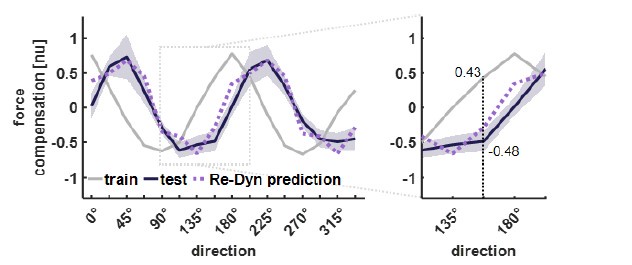
In experiments 1-3, in which there is a large shift of the force compensation curve, we found directions in which the generalized force was flipped in direction. That is, clockwise force profiles in the training workspace could change into counter-clockwise profiles in the test workspace. For example, in experiment 2, for movement at 157.5° we can see that the force profile was clockwise for the training workspace (with a force compensation value of 0.43) and movement at the same direction was counterclockwise for test workspace 1 (force compensation equal to -0.48). Importantly, we found that the noise based model could predict this change.
Author response image 2.
Results of experiment 2. Force compensation profiles for the training workspace (grey solid line) and test workspace 1 (dark blue solid line). Examining the force nature for the 157.5° direction, we found a change in the applied force by the participants (change from clockwise to counterclockwise forces). This was supported by a change in force compensation value (0.43 vs. -0.48). The noise based model can predict this change as shown by the predicted force compensation profile (green dashed line).
I don't believe the decay factor that was used to scale the test functions was specified in the text, although I may have just missed this. It would be a good idea to state what this factor is where relevant in the text.
We added an equation describing the decay factor (new equation 7 in the Methods section) according to this suggestion and Reviewer 1 comment on the same issue.
Reviewer #3 (Public Review):
The author proposed the minimum variance principle in the memory representation in addition to two alternative theories of the minimum energy and the maximum smoothness. The strength of this paper is the matching between the prediction data computed from the explicit equation and the behavioral data taken in different conditions. The idea of the weighting of multiple coordinate systems is novel and is also able to reconcile a debate in previous literature.
The weakness is that although each model is based on an optimization principle, but the derivation process is not written in the method section. The authors did not write about how they can derive these weighting factors from these computational principles. Thus, it is not clear whether these weighting factors are relevant to these theories or just hacking methods. Suppose the author argues that this is the result of the minimum variance principle. In that case, the authors should show a process of how to derive these weighting factors as a result of the optimization process to minimize these cost functions.
The reviewer brings up a very important point regarding the model. As shown below, it is not trivial to derive these weights using an analytical optimization process. We demonstrate one issue with this optimization process.
The force representation can be written as (similar to equation 6):

We formulated the problem as minimizing the variance of the force according to the weights w:
In this case, the variance of the force is the variance-covariance matrix which can be minimized by minimizing the matrix trace:

We will start by calculating the variance of the force representation in joints coordinate system:

Here, the force variance is a result of a complex function which include the joints angle as a random variable. Expending the last expression, although very complex, is still possible. In the resulted expression, some of the resulted terms include calculating the variance of nested trigonometric functions of the random joint angle variance, for example:

In the vast majority of these cases, analytical solutions do not exist. Similar issues can also raise for calculating the variance of complex multiplication of trigonometric functions such as in the case of multiplication of Jacobians (and inverse Jacobians)
To overcome this problem, we turned to numerical solutions which simulate the variance due to the different state variables.
In addition, I am concerned that the proposed model can cancel the property of the coordinate system by the predicted variance, and it can work for any coordinate system, even one that is not used in the human brain. When the applied force is given in Cartesian coordinates, the directionality in the generalization ability of the memory of the force field is characterized by the kinematic relationship (Jacobian) between the Cartesian coordinate and the coordinate of interest (Cartesian, joint, and object) as shown in Equation 3. At the same time, when a displacement (epsilon) is considered in a space and a corresponding displacement is linked with kinematic equations (e.g., joint displacement and hand displacement in 2 joint arms in this paper), the generated variances in different coordinate systems are linked with the kinematic equation each other (Jacobian). Thus, how a small noise in a certain coordinate system generates the hand force noise (sigma_x, sigma_j, sigma_o) is also characterized by the kinematics (Jacobian). Thus, when the predicted forcefield (F_c, F_j, F_o) was divided by the variance (F_c/sigma_c^2, F_j/sigma_j^2, F_o/sigma_o^2, ), the directionality of the generalization force which is characterized by the Jacobian is canceled by the directionality of the sigmas which is characterized by the Jacobian. Thus, as it has been read out from Fig*D and E top, the weight in E-top of each coordinate system is always the inverse of the shift of force from the test force by which the directionality of the generalization is always canceled.
Once this directionality is canceled, no matter how to compute the weighted sum, it can replicate the memorized force. Thus, this model always works to replicate the test force no matter which coordinate system is assumed. Thus, I am suspicious of the falsifiability of this computational model. This model is always true no matter which coordinate system is assumed. Even though they use, for instance, the robot coordinate system, which is directly linked to the participant's hand with the kinematic equation (Jacobian), they can replicate this result. But in this case, the model would be nonsense. The falsifiability of this model was not explicitly written.
As explained above, calculating the variability of the generalized forces given the random nature of the state variable is a complex function that is not summarized using a Jacobian. Importantly the model is unable to reproduce or replicate the test force arbitrarily. In fact, we have already shown this (see Appendix 1- figure 1), where when we only attempt to explain the data with either a single coordinate system (or a combination of two coordinate systems) we are completely unable to replicate the test data despite using this model. For example, in experiment 4, when we don’t use the joint based coordinate system, the model predicts zero shift of the force compensation pattern while the behavioral data show a shift due to the contribution of the joint coordinate system. Any arbitrary model (similar to the random model we tested, please see the response to Reviewer 1) would be completely unable to recreate the test data. Our model instead makes very specific predictions about the weighting between the three coordinate systems and therefore completely specified force predictions for every possible test posture. We added this point to the Discussion
“The results we present here support the idea that the motor system can use multiple representations during adaptation to novel dynamics. Specifically, we suggested that we combine three types of coordinate systems, where each is independent of the other (see Appendix 1- figure 1 for comparison with other combinations). Other combinations that include a single or two coordinate system can explain some of the results but not all of them, suggesting that force representation relies on all three with specific weights that change between generalization scenarios.”
-
eLife Assessment
This study provides a valuable new perspective on how motor learning occurring in one state generalizes to new states (for example, a different limb posture). The proposed model improves upon previous theories in its ability to predict patterns of generalization, but evidence supporting this specific proposed model over possible alternatives is incomplete. The newly proposed theory appears promising but would be more convincing if its conceptual and theoretical basis were clearer and more rigorously derived.
-
Reviewer #1 (Public Review):
This paper proposes a novel framework for explaining patterns of generalization of force field learning to novel limb configurations. The paper considers three potential coordinate systems: cartesian, joint-based, and object-based. The authors propose a model in which the forces predicted under these different coordinate frames are combined according to the expected variability of produced forces. The authors show, across a range of changes in arm configurations, that the generalization of a specific force field is quite well accounted for by the model.
The paper is well-written and the experimental data are very clear. The patterns of generalization exhibited by participants - the key aspect of the behavior that the model seeks to explain - are clear and consistent across participants. The paper clearly …
Reviewer #1 (Public Review):
This paper proposes a novel framework for explaining patterns of generalization of force field learning to novel limb configurations. The paper considers three potential coordinate systems: cartesian, joint-based, and object-based. The authors propose a model in which the forces predicted under these different coordinate frames are combined according to the expected variability of produced forces. The authors show, across a range of changes in arm configurations, that the generalization of a specific force field is quite well accounted for by the model.
The paper is well-written and the experimental data are very clear. The patterns of generalization exhibited by participants - the key aspect of the behavior that the model seeks to explain - are clear and consistent across participants. The paper clearly illustrates the importance of considering multiple coordinate frames for generalization, building on previous work by Berniker and colleagues (JNeurophys, 2014). The specific model proposed in this paper is parsimonious, but there remain a number of questions about its conceptual premises and the extent to which its predictions improve upon alternative models.
A major concern is with the model's premise. It is loosely inspired by cue integration theory but is really proposed in a fairly ad hoc manner, and not really concretely founded on firm underlying principles. It's by no means clear that the logic from cue integration can be extrapolated to the case of combining different possible patterns of generalization. I think there may in fact be a fundamental problem in treating this control problem as a cue-integration problem. In classic cue integration theory, the various cues are assumed to be independent observations of a single underlying variable. In this generalization setting, however, the different generalization patterns are NOT independent; if one is true, then the others must inevitably not be. For this reason, I don't believe that the proposed model can really be thought of as a normative or rational model (hence why I describe it as 'ad hoc'). That's not to say it may not ultimately be correct, but I think the conceptual justification for the model needs to be laid out much more clearly, rather than simply by alluding to cue-integration theory and using terms like 'reliability' throughout.
A more rational model might be based on Bayesian decision theory. Under such a model, the motor system would select motor commands that minimize some expected loss, averaging over the various possible underlying 'true' coordinate systems in which to generalize. It's not entirely clear without developing the theory a bit exactly how the proposed noise-based theory might deviate from such a Bayesian model. But the paper should more clearly explain the principles/assumptions of the proposed noise-based model and should emphasize how the model parallels (or deviates from) Bayesian-decision-theory-type models.
Another significant weakness is that it's not clear how closely the weighting of the different coordinate frames needs to match the model predictions in order to recover the observed generalization patterns. Given that the weighting for a given movement direction is over-parametrized (i.e. there are 3 variable weights (allowing for decay) predicting a single observed force level, it seems that a broad range of models could generate a reasonable prediction. It would be helpful to compare the predictions using the weighting suggested by the model with the predictions using alternative weightings, e.g. a uniform weighting, or the weighting for a different posture. In fact, Fig. 7 shows that uniform weighting accounts for the data just as well as the noise-based model in which the weighting varies substantially across directions. A more comprehensive analysis comparing the proposed noise-based weightings to alternative weightings would be helpful to more convincingly argue for the specificity of the noise-based predictions being necessary. The analysis in the appendix was not that clearly described, but seemed to compare various potential fitted mixtures of coordinate frames, but did not compare these to the noise-based model predictions.
-
Reviewer #2 (Public Review):
Leib & Franklin assessed how the adaptation of intersegmental dynamics of the arm generalizes to changes in different factors: areas of extrinsic space, limb configurations, and 'object-based' coordinates. Participants reached in many different directions around 360{degree sign}, adapting to velocity-dependent curl fields that varied depending on the reach angle. This learning was measured via the pattern of forces expressed in upon the channel wall of "error clamps" that were randomly sampled from each of these different directions. The authors employed a clever method to predict how this pattern of forces should change if the set of targets was moved around the workspace. Some sets of locations resulted in a large change in joint angles or object-based coordinates, but Cartesian coordinates were always the …
Reviewer #2 (Public Review):
Leib & Franklin assessed how the adaptation of intersegmental dynamics of the arm generalizes to changes in different factors: areas of extrinsic space, limb configurations, and 'object-based' coordinates. Participants reached in many different directions around 360{degree sign}, adapting to velocity-dependent curl fields that varied depending on the reach angle. This learning was measured via the pattern of forces expressed in upon the channel wall of "error clamps" that were randomly sampled from each of these different directions. The authors employed a clever method to predict how this pattern of forces should change if the set of targets was moved around the workspace. Some sets of locations resulted in a large change in joint angles or object-based coordinates, but Cartesian coordinates were always the same. Across three separate experiments, the observed shifts in the generalized force pattern never corresponded to a change that was made relative to any one reference frame. Instead, the authors found that the observed pattern of forces could be explained by a weighted combination of the change in Cartesian, joint, and object-based coordinates across test and training contexts.
In general, I believe the authors make a good argument for this specific mixed weighting of different contexts. I have a few questions that I hope are easily addressed.
Movements show different biases relative to the reach direction. Although very similar across people, this function of biases shifts when the arm is moved around the workspace (Ghilardi, Gordon, and Ghez, 1995). The origin of these biases is thought to arise from several factors that would change across the different test and training workspaces employed here (Vindras & Viviani, 2005). My concern is that the baseline biases in these different contexts are different and that rather the observed change in the force pattern across contexts isn't a function of generalization, but a change in underlying biases. Baseline force channel measurements were taken in the different workspace locations and conditions, so these could be used to show whether such biases are meaningfully affecting the results.
Experiment 3, Test 1 has data that seems the worst fit with the overall story. I thought this might be an issue, but this is also the test set for a potentially awkwardly long arm. My understanding of the object-based coordinate system is that it's primarily a function of the wrist angle, or perceived angle, so I am a little confused why the length of this stick is also different across the conditions instead of just a different angle. Could the length be why this data looks a little odd?
The manuscript is written and organized in a way that focuses heavily on the noise element of the model. Other than it being reasonable to add noise to a model, it's not clear to me that the noise is adding anything specific. It seems like the model makes predictions based on how many specific components have been rotated in the different test conditions. I fear I'm just being dense, but it would be helpful to clarify whether the noise itself (and inverse variance estimation) are critical to why the model weights each reference frame how it does or whether this is just a method for scaling the weight by how much the joints or whatever have changed. It seems clear that this noise model is better than weighting by energy and smoothness.
Are there any force profiles for individual directions that are predicted to change shape substantially across some of these assorted changes in training and test locations (rather than merely being scaled)? If so, this might provide another test of the hypotheses.
I don't believe the decay factor that was used to scale the test functions was specified in the text, although I may have just missed this. It would be a good idea to state what this factor is where relevant in the text.
-
Reviewer #3 (Public Review):
The author proposed the minimum variance principle in the memory representation in addition to two alternative theories of the minimum energy and the maximum smoothness. The strength of this paper is the matching between the prediction data computed from the explicit equation and the behavioral data taken in different conditions. The idea of the weighting of multiple coordinate systems is novel and is also able to reconcile a debate in previous literature.
The weakness is that although each model is based on an optimization principle, but the derivation process is not written in the method section. The authors did not write about how they can derive these weighting factors from these computational principles. Thus, it is not clear whether these weighting factors are relevant to these theories or just hacking …
Reviewer #3 (Public Review):
The author proposed the minimum variance principle in the memory representation in addition to two alternative theories of the minimum energy and the maximum smoothness. The strength of this paper is the matching between the prediction data computed from the explicit equation and the behavioral data taken in different conditions. The idea of the weighting of multiple coordinate systems is novel and is also able to reconcile a debate in previous literature.
The weakness is that although each model is based on an optimization principle, but the derivation process is not written in the method section. The authors did not write about how they can derive these weighting factors from these computational principles. Thus, it is not clear whether these weighting factors are relevant to these theories or just hacking methods. Suppose the author argues that this is the result of the minimum variance principle. In that case, the authors should show a process of how to derive these weighting factors as a result of the optimization process to minimize these cost functions.
In addition, I am concerned that the proposed model can cancel the property of the coordinate system by the predicted variance, and it can work for any coordinate system, even one that is not used in the human brain. When the applied force is given in Cartesian coordinates, the directionality in the generalization ability of the memory of the force field is characterized by the kinematic relationship (Jacobian) between the Cartesian coordinate and the coordinate of interest (Cartesian, joint, and object) as shown in Equation 3. At the same time, when a displacement (epsilon) is considered in a space and a corresponding displacement is linked with kinematic equations (e.g., joint displacement and hand displacement in 2 joint arms in this paper), the generated variances in different coordinate systems are linked with the kinematic equation each other (Jacobian). Thus, how a small noise in a certain coordinate system generates the hand force noise (sigma_x, sigma_j, sigma_o) is also characterized by the kinematics (Jacobian). Thus, when the predicted forcefield (F_c, F_j, F_o) was divided by the variance (F_c/sigma_c^2, F_j/sigma_j^2, F_o/sigma_o^2, ), the directionality of the generalization force which is characterized by the Jacobian is canceled by the directionality of the sigmas which is characterized by the Jacobian. Thus, as it has been read out from Fig*D and E top, the weight in E-top of each coordinate system is always the inverse of the shift of force from the test force by which the directionality of the generalization is always canceled. Once this directionality is canceled, no matter how to compute the weighted sum, it can replicate the memorized force. Thus, this model always works to replicate the test force no matter which coordinate system is assumed. Thus, I am suspicious of the falsifiability of this computational model. This model is always true no matter which coordinate system is assumed. Even though they use, for instance, the robot coordinate system, which is directly linked to the participant's hand with the kinematic equation (Jacobian), they can replicate this result. But in this case, the model would be nonsense. The falsifiability of this model was not explicitly written.
-
